Projects
Things I've built.
Policy Gradients & MuJoCo
Vanilla Actor-Critic policy gradient algorithm on a custom MDP. Small neural networks for policy and value function, trained in a MuJoCo physics environment with Gaussian action noise.
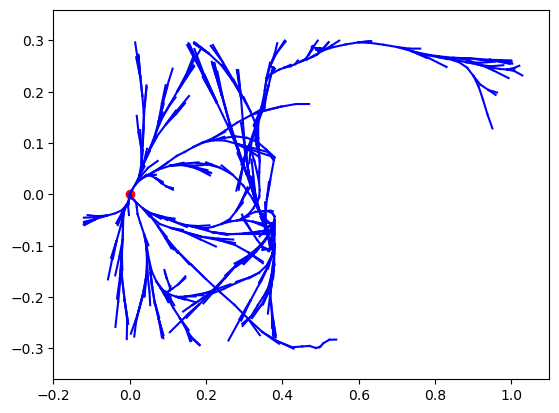
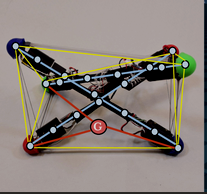
Kinodynamic RRT
Motion planner for systems with dynamic constraints. Implements Kinodynamic RRT in MuJoCo — grows a tree in state-control space using forward simulation, achieving 100% success rate at 20s time budget.